src/analysis/interpolation/MathUtils.h File Reference
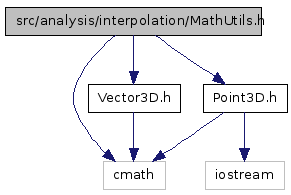
#include <cmath>#include "Vector3D.h"#include "Point3D.h"
Include dependency graph for MathUtils.h:
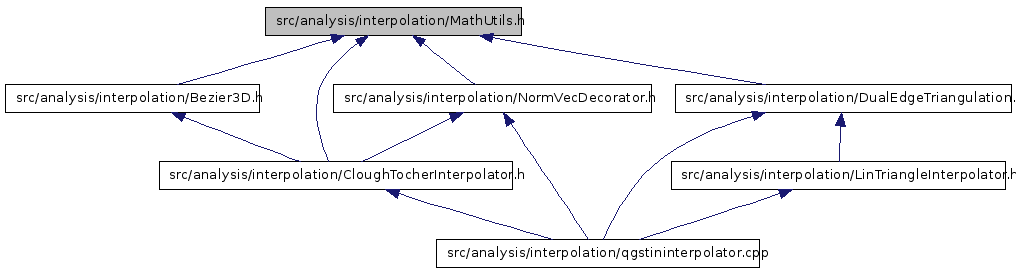
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | MathUtils |
Functions | |
| bool ANALYSIS_EXPORT | MathUtils::calcBarycentricCoordinates (double x, double y, Point3D *p1, Point3D *p2, Point3D *p3, Point3D *result) |
| Calculates the barycentric coordinates of a point (x,y) with respect to p1, p2, p3 and stores the three barycentric coordinates in 'result'. | |
| bool ANALYSIS_EXPORT | MathUtils::BarycentricToXY (double u, double v, double w, Point3D *p1, Point3D *p2, Point3D *p3, Point3D *result) |
| double ANALYSIS_EXPORT | MathUtils::calcBernsteinPoly (int n, int i, double t) |
| calculates the value of a Bernstein polynomial | |
| double ANALYSIS_EXPORT | MathUtils::cFDerBernsteinPoly (int n, int i, double t) |
| calculates the first derivative of a Bernstein polynomial with respect to the parameter t | |
| double ANALYSIS_EXPORT | MathUtils::calcCubicHermitePoly (int n, int i, double t) |
| calculates the value of a cubic Hermite polynomial | |
| double ANALYSIS_EXPORT | MathUtils::cFDerCubicHermitePoly (int n, int i, double t) |
| calculates the first derivative of a cubic Hermite polynomial with respect to the parameter t | |
| bool ANALYSIS_EXPORT | MathUtils::circumcenter (Point3D *p1, Point3D *p2, Point3D *p3, Point3D *result) |
| Calculates the center of the circle passing through p1, p2 and p3. | |
| double ANALYSIS_EXPORT | MathUtils::distPointFromLine (Point3D *thepoint, Point3D *p1, Point3D *p2) |
| Calculates the (2 dimensional) distance from 'thepoint' to the line defined by p1 and p2. | |
| int ANALYSIS_EXPORT | MathUtils::faculty (int n) |
| faculty function | |
| bool ANALYSIS_EXPORT | MathUtils::inCircle (Point3D *testp, Point3D *p1, Point3D *p2, Point3D *p3) |
| Tests, whether 'testp' is inside the circle through 'p1', 'p2' and 'p3'. | |
| bool ANALYSIS_EXPORT | MathUtils::inDiametral (Point3D *p1, Point3D *p2, Point3D *point) |
| Tests, whether 'point' is inside the diametral circle through 'p1' and 'p2'. | |
| double ANALYSIS_EXPORT | MathUtils::leftOf (Point3D *thepoint, Point3D *p1, Point3D *p2) |
| Returns whether 'thepoint' is left or right of the line from 'p1' to 'p2'. | |
| bool ANALYSIS_EXPORT | MathUtils::lineIntersection (Point3D *p1, Point3D *p2, Point3D *p3, Point3D *p4) |
| Returns true, if line1 (p1 to p2) and line2 (p3 to p4) intersect. | |
| bool ANALYSIS_EXPORT | MathUtils::lineIntersection (Point3D *p1, Point3D *p2, Point3D *p3, Point3D *p4, Point3D *intersection_point) |
| Returns true, if line1 (p1 to p2) and line2 (p3 to p4) intersect. | |
| int ANALYSIS_EXPORT | MathUtils::lower (int n, int i) |
| lower function | |
| double ANALYSIS_EXPORT | MathUtils::max (double x, double y) |
| returns the maximum of two doubles or the first argument if both are equal | |
| double ANALYSIS_EXPORT | MathUtils::min (double x, double y) |
| returns the minimum of two doubles or the first argument if both are equal | |
| double ANALYSIS_EXPORT | MathUtils::power (double a, int b) |
| power function for integer coefficients | |
| double ANALYSIS_EXPORT | MathUtils::triArea (Point3D *pa, Point3D *pb, Point3D *pc) |
| returns the area of a triangle. | |
| bool ANALYSIS_EXPORT | MathUtils::derVec (const Vector3D *v1, const Vector3D *v2, Vector3D *result, double x, double y) |
| Calculates the z-component of a vector with coordinates 'x' and 'y'which is in the same tangent plane as the tangent vectors 'v1' and 'v2'. | |
| double ANALYSIS_EXPORT | MathUtils::crossVec (Point3D *first, Vector3D *vec1, Point3D *second, Vector3D *vec2) |
| Calculates the intersection of the two vectors vec1 and vec2, which start at first(vec1) and second(vec2) end. | |
| bool ANALYSIS_EXPORT | MathUtils::normalLeft (Vector3D *v1, Vector3D *result, double length) |
| Assigns the vector 'result', which is normal to the vector 'v1', on the left side of v1 and has length 'length'. | |
| bool ANALYSIS_EXPORT | MathUtils::normalRight (Vector3D *v1, Vector3D *result, double length) |
| Assigns the vector 'result', which is normal to the vector 'v1', on the right side of v1 and has length 'length'. | |
| void ANALYSIS_EXPORT | MathUtils::normalFromPoints (Point3D *p1, Point3D *p2, Point3D *p3, Vector3D *vec) |
| Calculates the normal vector of the plane through the points p1, p2 and p3 and assigns the result to vec. | |
| bool ANALYSIS_EXPORT | MathUtils::pointInsideTriangle (double x, double y, Point3D *p1, Point3D *p2, Point3D *p3) |
| Returns true, if the point with coordinates x and y is inside (or at the edge) of the triangle p1,p2,p3 and false, if it is outside. | |
| bool ANALYSIS_EXPORT | MathUtils::normalMinDistance (Vector3D *tangent, Vector3D *target, Vector3D *result) |
| Calculates a Vector orthogonal to 'tangent' with length 1 and closest possible to result. | |
| double ANALYSIS_EXPORT | MathUtils::planeTest (Point3D *test, Point3D *pt1, Point3D *pt2, Point3D *pt3) |
| Tests, if 'test' is in the same plane as 'p1', 'p2' and 'p3' and returns the z-difference from the plane to 'test. | |
| double ANALYSIS_EXPORT | MathUtils::angle (Point3D *p1, Point3D *p2, Point3D *p3, Point3D *p4) |
| Calculates the angle between two segments (in 2 dimension, z-values are ignored). | |